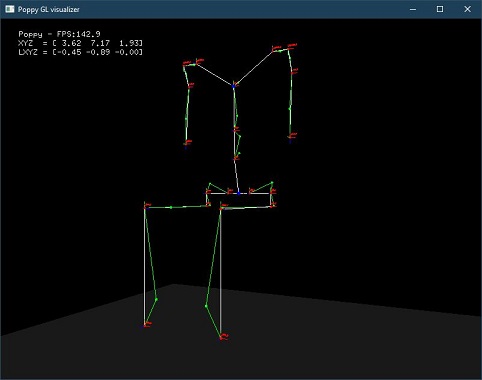
Poppy Controller
Introduction
Sources : https://github.com/poppy-project/poppy-humanoid
This project can be built and ran on Linux or Windows.
Build
This project is configured to be used with Visual Studio Code (Windows version) with CMake Tools and C/C++ plugin installed. But, you can also follow the steps under to run it without it.
Prerequisite Windows :
/!\ Please make sure they are in the PATH.
Prerequisite Linux :
$ sudo apt-get install freeglut3-dev make cmake g++Compilation :
Windows note : you will have run cmake as follow to make it work (later)
$ cmake ../ -G "Unix Makefiles"Commands :
$ cd PoppyCpp
$ mkdir build
$ cd build
$ cmake ../
$ make -j4Usage :
When in the build directory, run using this command :
$ ./PoppyCpp| Command | Action |
|---|---|
| set sat | set poppy position sitting |
| set T | set poppy position in T pose |
| play dab | replay csv with interpolation (csv path realative to executable) |
| vrep connect | connect to vrep |
| vrep copy | sync joint position to vrep |
| play puppy | sync joint position from vrep |
| play disconnect | stop and disconnect vrep |
You can also run the python file that will send commands over sockets (as GUI)
$ py python/clientPoppy.pyExample with vrep copy
poppy> poppy set dab
poppy> vrep connect
poppy> vrep copy
poppy> play dab
Controls :
| Keys | Action |
|---|---|
| Q / D | LEFT / RIGHT |
| Z / S | Forward / Backward |
| R / F | Up / Down |
Click and move the mouse to turn the camera.
Generate Transformation Matrix
The transformation matrix are generated before the compilation.
$ cd modules/PoppyURDF
$ py compensation_gravite_2020.pyIt will generate poppy.cpp which contains the transformation matrices.
License
The MIT License (MIT)